
With the next version of betaflight 3.4 just around the corner (expected release date of 1st July 2018), this is a quick post to highlight some of the best new changes you can expect to see and use!
F7 Performance Improvements
Betaflight has now been further optimised to run on F7 targets. This lets you crank up your PID/Gyro update rates and enable more features! It may finally be the time to start to think about upgrading your FC to an F7 flight controller… That said, there is no rush to upgrade as F4 controllers are still good enough for most (if not all) of Betaflight’s feature list.

FPV Simulator Mode
From betaflght 3.4 you will be able to use your flight controller as a USB Joystick (HID) device. This means that your PC can read your RC stick commands as a joystick, making it incredibly easy to get some practice on an FPV simulator with your quadcopter on a rainy day. For a beginner, this is a great way to get used to FPV before flying in real life, which could save your wallet some strain! Not sure which simulator to use? Check out our best FPV simulators guide.
GPS Rescue Mode
Another very cool new feature is the GPS rescue mode (it should go without saying; a GPS module is needed for this to work). This is not a true GPS return to home function as it does not land your quad. But if you loose FPV signal, or R/C signal, rather than having the standard failsafe (your quad falls out of the sky), GPS rescue mode will fly your quad home. Right now you will need at least an F4 board to use this, and a decent GPS module. A great side-note is that you don’t need a compass or barometer to use this, although they will increase performance if your FC/GPS module has them). Check out the GPS Rescue mode setup guide for more information.
Don’t set GPS rescue as your default failsafe until you’re sure it’ll work as expected – you will need to test this safely beforehand!
🚨 Warning:
Acro Trainer Mode
This is a new flight mode that is a blend between acro and angle mode. So it does not keep your quad level (as that forms bad flying habits), but it also prevents your quad from rotating beyond a set angle (30 degrees by default). This is an ideal beginner mode as you can get used to acro mode while still having some safety net of not being able to flip upside down, which should help you newbies feel more comfortable!

USB Mass Storage Mode
For flight controllers that use a microSD card or onboard flash, your PC can now detect them as a storage device. All you need to do is go to the CLI and type msc and you can then read the contents as a external storage device.
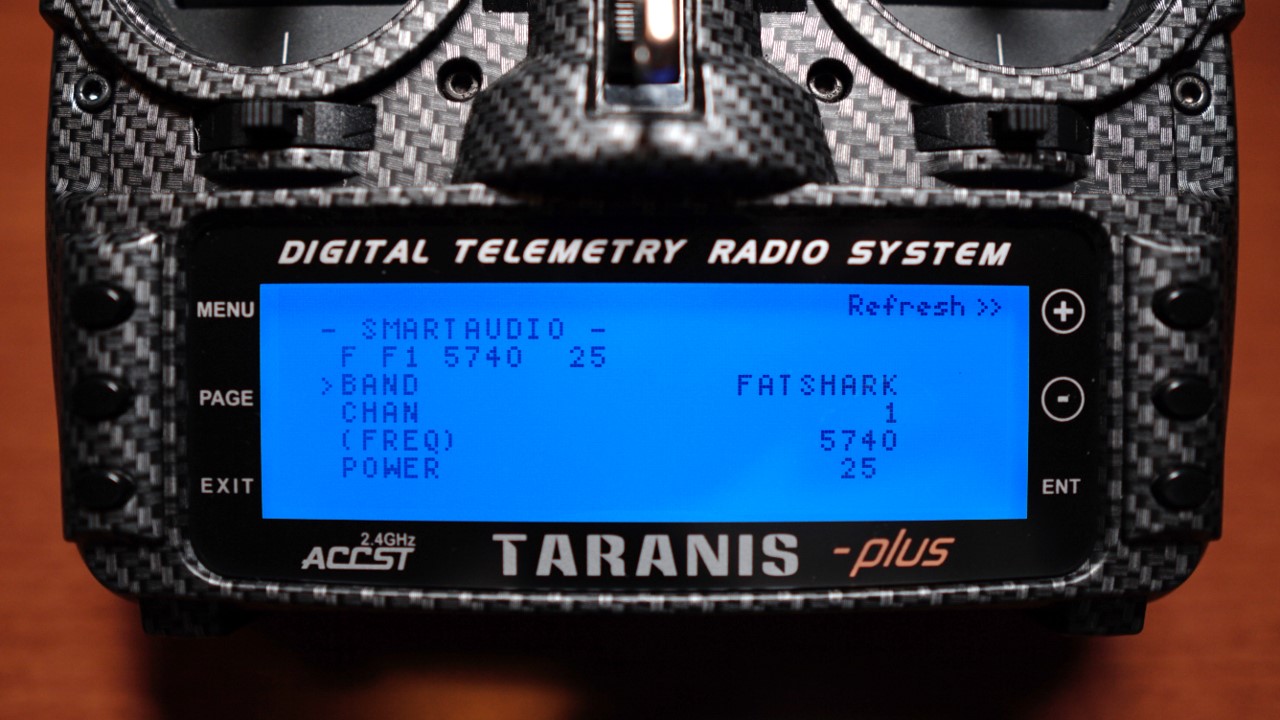
TBS Crossfire CMS Telemetry
With Betaflight 3.4, you now have full CMS telemetry support via TBS crossfire. This lets you change your PID’s or smart audio settings directly from your radio. This can be ideal if you don’t want to use your OSD to change some settings at the field.
If you are on the fence about TBS crossfire this new feature may push you over. As of yet, we’ve not met anyone who doesn’t like what TBS crossfire setups offer!
Better Filtering and Defaults
Just like with each new major betaflight release you will notice some performance enhancements with 3.4 out of the box. This is mainly because the default settings have been optimised and the algorithms have been refined. The default settings have been changed for betaflight 3.4, namely that the dynamic filter is now set to be on by default. This uses a fair amount of your CPU, particularity if you have fast gyro update/PID loops of 16khz or 32khz. In general this trade-off should give you much better performance. The previous default filtering was set up to be good enough for the vast majority of quadcopters – resulting in some additional, unnecessary latency in the system. By using a dynamic filter, your FC adjusts itself to filter out noise specific to your system, it may not work as well as setting a notch filter yourself, but it is much easier as it does not require lots of manual tuning. This all results in a much better ‘out-of-the-box’ flight performance.

PID loop improvements
Read the official beta-flight release notes to dig into all the details, but the main takeaways are Absolute Control, Smart Feedforward and ITerm Relax.
- Absolute control improves performance and control while yawing your drone.
- ITerm Relax, when on will reduce overshoot when flipping quickly. Its a good idea to just turn this on. It will also have a greater effect when you are using larger props, as it ramps up the throttle response, which goes some way to reducing the time it takes for the motors to spin them up.
- Smart Feedforward gets into the nitty gritty details of the PID. So a very basic description is as follows: The feed forward gain uses your stick input movements to get P gains faster than the normal PID (which respond to your current drone movement), essentially improving response time. However, when you are not using the sticks, this gain can mess things up. But you obviously still want your quad to fly rock solidly with no stick inputs – so smart feed forward will decide when to add the feed forward gain. This results in your drone having better stick response while still having good environmental response (like adjusting to gusts of wind).
Paralyse Mode
This is a mode aimed towards FPV racers. When you crash at a race it is unsafe to go and retrieve your quadcopter while others are racing. What paralyse mode does is let you safely switch to your backup quad by disabling arming, VTX, and Telemetry on the downed quad. Once paralyse mode is enabled you will need to power cycle your quadcopter before you can arm it again.

These are just a few of the most significant features coming in betaflight 3.4 – there’s loads more to read into! If that’s what you’re all about, you can read more at BetaFlight’s github release page. Which feature are you most excited for?
Otherwise, if you are absolutely dying to try out the new features, rather than studying all the nitty-gritty details; you can always try the latest release candidate build by selecting ‘show unstable releases’ in the Betaflight configurator – only do this, however, if you are prepared to fly knowing some things have not been fully tested yet!


