We have now released a video going through the process of setting up your Crusader GT2 with a X4R receiver and a Taranis QX7. This video goes through the quickest way you can get your Crusader GT2 up and running and in the air.
Check out the video here:
Setting up the Crusader GT2 with the Taranis QX7 Video
Video Links
The Transcript (more of less)
I have also included here the loose transcript of the video for anyone who needs/is interested in it.
- Welcome to this video on how to set up your Crusader GT2 with a FrSky Taranis QX7
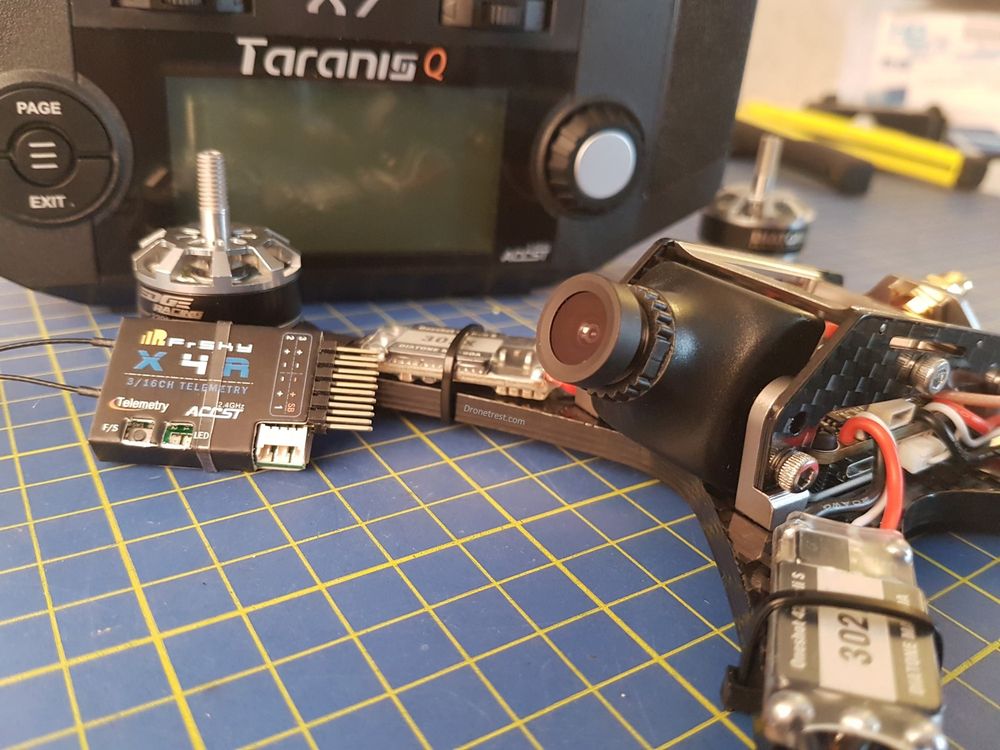
- The Crusader GT2 doesn’t come with a receiver and so you have to first get your hands on a FrSky compatible receiver.
- In this video, we’re going to use the popular X4R and we’re going to use the version of the receiver that doesn’t come with pins pre-soldered (even though this is not shown here). This is because it fits better in the frame.
- You get a bunch of cables with the GT2 and so we need to pick out the one that we’re going to need to connect the receiver to the flight controller.
- In this case, this will be this PPM/SBUS cable (the X4R is a SBUS receiver).
- First thing to look at is the manual that comes with the GT2. This is a diagram of the flight controller and this is the receiver connector that we are interested in.
- If you look closely, you will see that the pins are labelled ground, 5V, PPM and SBUS.
- These pins correspond to the black wire is ground, the red is 5V and we have 2 white wires for PPM and SBUS
- We are only interested in the SBUS wire in this case and we can actually remove the PPM wire as it isn’t needed (make sure you get the right one though!)
- We can also cut these cables are we will be soldering these directly onto the receiver. We need about half the length here.
- Here is the bare X4R receiver and we need to solder the three wires to the bottom left three holes on the receiver as we look at it. The order is SBUS, 5V and then the ground i.e. white, red, black.
- At this stage, we now need to access the flight controller. The GT2 has a nice cage protecting the electronics and this is what we have to lift off to get to the flight controller.
- So we just need to remove the two front screws
- And you also need to loosen the screw at the back of the cage
- And this should then simply lift off
- So we then simply plug the receive into the connector on the flight controller and before we mount the receiver, we’re going to bind it to the radio, and get it set up.
- You can bind this receiver in several different modes but we are going to stick with the default mode, which is D16.
- This way you don’t have to short any pins, and SBUS will be outputted, which is what we want.
- So now we move onto the Taranis to get it bound to the GT2.
- We first edit a model and you can have several different models for different quads and so we want to name this one GT2 or something similar.
- You then scroll down to the bottom of this menu and you can see it is in D16 mode, as we wanted, we’re going to have 1-16 channels and so we can now bind it.
- You scroll to ‘bind’, press the right button and the Taranis will enter binding mode. You will know it is in this mode when it makes a beeping sound.
- Before powering the receiver to bind it, it is important to attach the antenna for the video transmitter. Otherwise, the power could blow the video transmitter.
- So to bind the receiver, all we need to do is to press the bind button on the receiver while plugging in the battery. You must ensure that the Taranis is in binding mode as you do this.
- You will then see the flashing light on the receiver turn green to signal that it is successfully bound.
- So now that we have a model set up, we might as well set up some extra channels as well.
- So you select the model, and page through the different menus until you reach the inputs menu where you can see which channels have been setup.
- At the moment, these are just the default 4 channels i.e. throttle, aileron, elevator and rudder
- To add other channels, we go through to the mixer menu.
- We go down to channel 5 and select this. What we’re going to do here is to set this channel as the arming switch. We therefore want this to be a 2-position switch ideally ion the radio and this one at the back will work well.
- We’re going to name this channel so we remember what it is. We’ll call it ‘Arm’. Press exit when done.
- We can then select the source of the channel i.e. which switch is going to control it. We do this by pressing the button so that the source flashes.
- When it is flashing, you can then simply flick the switch that you want to assign to this channel, in this case, the switch at the back of the Taranis. This switch is automatically then assigned as the source. In this case, this is SF.
- You can leave the rest of the settings as they are and exit that menu.
- Now you can see we have channel 5 set as ‘arm’ and we can move on to channel 6.
- We’re going to set these up as the flight modes and so we want a 3-position switch ideally for this.
- We’ll name this mode…
- We then select the source again and toggle a 3-position switch (in this case SB)
- Once we’ve done this, we can exit out and we can see that channel 6 is setup as ‘mode’.
- So now we have all 6 channels mapped, we can complete the configuration in betaflight
- So we just plug the flight controller into the computer and open up BetaFlight
- You hit connect in the top right corner
- We first need to tell BetaFlight what type of receiver we’re using (i.e. SBUS), so we go to the ‘Ports’ tab
- You then need to make sure the Serial RX is selected on UART3
- We then move on to the ‘Configuration’ tab and we look for the drop-down menu so that we can tell BetaFlight what type of receiver we’re using
- In this case, we want to select Serial Receiver and then we need to say what type of serial receiver we’re using and that is an SBUS receiver.
- After completing this, we need to hit ‘Save and Reboot’
- We can check that everything is working as it should by going onto the ‘Receiver’ tab, we you will see our channels.
- So with the Taranis radio turned on, as we move the sticks on the radio, the channels should move correspondingly on the screen
- However, as you will see here, the channels could be mapped incorrectly. I.e. when we move the throttle stick on the radio, the roll channel moves instead.
- We therefore need to change these channel mapping and we have a separate small video on how to do this.
- And so once we have changed the mapping, all the channels on the radio should correspond to the channels on screen
- We can then move onto setting up the flight modes. We go to the ‘Modes’ tab to do this.
- We first tackle the ‘Arm’ function and as you will remember, we set channel 5 on the radio to be the arming channel and this corresponds to AUX1 on BetaFlight.
- You select the range so that the little orange indicator at the bottom falls within the range when the switch on radio is in one position, and falls outside it when the switch is in the other position.
- It is best to put the range at the end of the line here so that you arm the quad by flicking the 2-position switch toward you.
- After saving this, and you will see that when you arm the quad (i.e. the orange indicator is within the range), the Arm mode becomes orange.
- For the rest of the flight modes, we have a little article on DroneTrest about setting up beginner flight modes and the screenshot on screen now is of these flight modes. The link is in the description below so check this out to set up beginner flight modes.
- So we’ve now completed the setup in BetaFlight and we just need to install the receiver onto the Crusader.
- Before we do this, we need to make sure there are no contacts on the receiver to short-circuit it and so we need to wrap it in heat shrink or in electrical tape.
- We’ll use tape here as it’s slightly easier.
- Once that’s done, we can then slot the receiver into the space under the protection cage and there is no real need for anything else to secure the receiver as it fits pretty snuggly under the cage.
- Now we just need to tidy up the antenna as we don’t want them loose and getting caught in any propellers.
- It’s best if they are placed at 90 degrees to one another as this means they receive the best signal, and so we can secure them to two of the arms of the quad.
- We can do this but slipping them under the zip-ties that are holding the ESCs in place.
- We can then further secure them with electrical tape.
- And so that’s it! We’ve added the X4R receiver to the Crusader GT2 and configured it in BetaFlight. You can now re-attach the protection cage and get flying!




