
I recently got my hands on a PX4 Mini v1.4 autopilot board. The PX4 mini is what you get when a Pixhawk and a Naze 32 does what two boards in love do, and the PX4 mini is the result. So you can think of it as a racing quadcopter flight controller in terms of its size (35x35mm) but with all the features of a full pixhawk autopilot running ardupilot.
The board
Despite the small size there is still a bunch of inputs and outputs available on the PX4 mini, you dont get as many as you would on a full size pixhawk, but all the important ports are available so you can connect a full suite of sensors and peripherals to your PX4 mini.
New peripherals include:
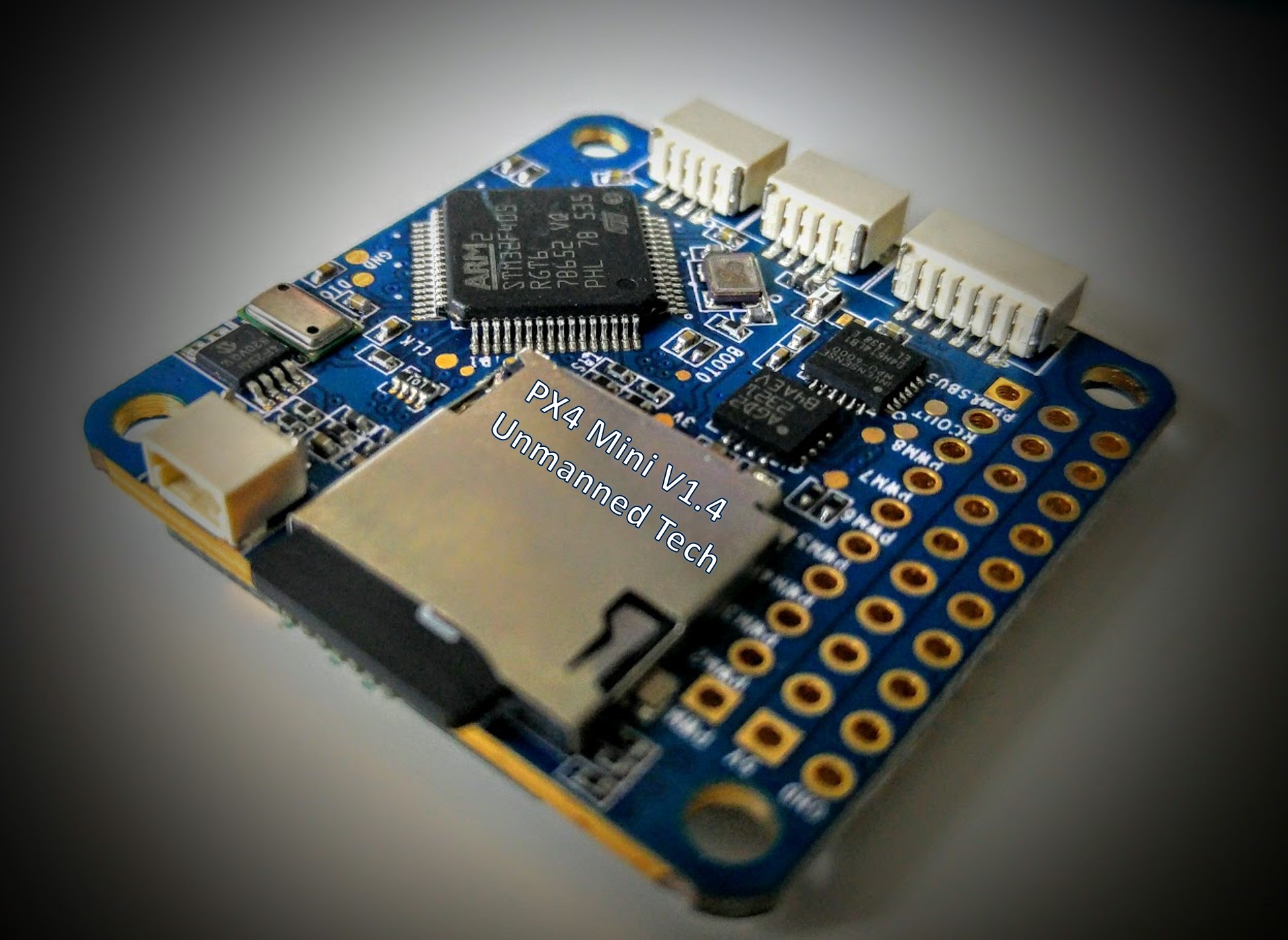
PX4 Mini Top

The top of the flight controller houses the micro SD card which takes up most of the space. On the left of the board are all of the PWM inputs and the SBUS/ PPM input from your receiver (but right now it seems that you dont get any pin headers with the board). Along the bottom are 1.25mm molex connectors for an ESC Direct Port (more on that later) and also your UART1 and UART2 ports.
- UART1 is used for IO DEBUG (RX only) which is usefull for developers
- UART2 is used for telemetry to connect your telemetry module. Its important to note that this is a 4pin port so will not be able to use the CTS/RTS ports. This is something you might notice at long ranges where these ports are used for flow control to avoid mixups in the sending and recieving of data. But under normal situations you will not notice anything amiss.
- ESC Direct Port – This is used for an upcomming 4in1 ESC that is designed to be used with the PX4mini autopilot. However for now these are just a repeat of the PWM output pins.
- Spektrum Port is used to connect your Spektrum satellite receiver
PX4 Mini Bottom

On the bottom of the board we have a couple more ports along with three status LED’s. A power LED, Active LED and Error LED which is the same as the external LED, or the large LED on a regular Pixhawk to show you the status of pixhawk.
- Safety Switch this is the safety switch and buzzer connector (included with the kit)
- Power Module a standard 6pin connector for an APM power module to provide power to the flight controller along with voltage and current measurements from your flight battery.
- GPS/Compass a 6 pin connector for your external compass sensor and GPS module. Since the original pixhawk has one connector for your GPS, and one connector for the compass you will need to modify the cables to connect any pixhawk compatible GPS module. Fortunately a spare cable set is included, but you can also buy the optional PX4mini Ublox M8N module.
- USB/LED this is another 6 pin connector used with the included external LED and USB module that you get with this kit.

Its very small

Next to an original Pixhawk flight controller the PX4 mini is tiny, its even smallar than our Unmanned Mini Hawk flight controller. So if you dont have much space but you want all the features and power of a pixhawk autopilot, then the PX4 mini is the ideal choice. The board itself measured in at just 35x35mm, and has a bare weight of only 11.8g. However with the aluminium case, safety swtich and external LED we are looking at a weight closer to 30g. However the PX4 board does include standard 30x30mm mounting holes so you dont need to use the case. Compared to a Naze 32 its still abit bigger
Verdict
My first impressions of the PX4 Mini are quite positive (hence why we sell this autopilot board). Not only is it smaller than a pixhawk, it is also more affordable.
However there are still a few annoying things about this board, with the most frustrating one being that it does not include any pin headers to connect standard ESC’s. The reason for this is that its meant to be used along with the 4in1 Typhoon ESC, but if you want to use this autopilot on a hexacopter or with motors that need more than 20A ESC, you will need to solder your own headers onto this board. We will include some loose connectors that you can solder on in future batches so you dont need to order them separately. However the fact it includes a quality aluminum case can make up for that fact :-).

I will be writing a quickstart guide for this autopilot so stay tuned for more. But if you have any questions just let me know!



